- 权威媒介推荐产品!
- 招商代理进行中......
- 吴玉锋总裁寄语:人活着,就是要帮助更多人实现梦想
- 热烈祝贺strainsert斯创森特入选中国进口称重测力传感器五大品牌排行榜
- Strainsert 获得 NASA 胶囊降落伞组装系统 (CPAS) 团队颁发的特别成就奖
- 全球最值得关注的前10大科技公司
- 全球前50大创新技术奖
- 智慧工厂解决方案APAC TOP1
- Strainsert斯创森特中国品牌营销总监毕总应邀参加第8届中国品牌节年会
- Strainsert斯创森特中国品牌营销总监毕总应邀参加中国500强企业发展年会
- Strainsert斯创森特中国产品技术总监杨总携手腾讯共建中国工业智能信息数据发展
- strainsert斯创森特中国产品技术总监杨总携手阿里巴巴共同推动中国工业自动化未来发展
- 热烈祝贺我公司总裁入选雄安新领军人才计划
- 定制力传感器:任务成功至关重要
- 识别最好的strainsert负载销
- 力量测量趋势
- 力传感紧固件的好处
- 潜水装置的优势
- 力传感器校准的重要性
- 无线负载电池的优点和应用
- 更新了双桥负载引脚应用说明
- 自定义负载引脚配置器的优点
- 更新了滑轮负载销的应用说明
- 更新了双轴负载销的应用说明
- 新负载销可选功能
校正双轴力传感器串扰
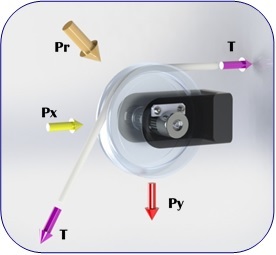
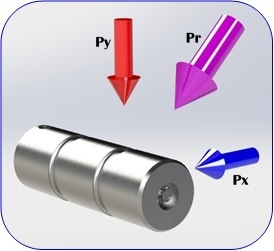
双轴力传感器引脚设计用于需要测量相对于 X 轴和 Y 轴的不同角度施加的力 (Pr) 的应用。应用通常包括 U 形销或滑轮销安装,如下所示。当以任意角度施加力时,应变仪会测量 X 和 Y 方向上的力分量。理想情况下,X 轴和 Y 轴的应变计读数值始终与任意施加力角度成几何比例。然而,典型的传感器系统测量结果可能会因称为串扰的情况而发生变化。
由于传感器主体和仪表安装的物理限制,串扰是不可避免的。无论制造商如何,这在所有双轴力传感器上都是典型的。每个传感器中的串扰量都会有所不同,并且是独特的,具体取决于难以控制甚至不可能控制的几个因素。更复杂的是,目标安装条件与制造设施的条件可能具有大于可接受的差异,无论尽最大努力最小化差异。双轴传感器制造商有时会花费昂贵的努力来尽量减少串扰的影响。不幸的是,这些努力根本无法预测目标应用程序中将遇到的未知差异。
Pr=√( &〖Px〗^2+〖Py〗^2 ) 我处理 Bi-Axial Pin (无串扰)
Pr≠√( &〖Px〗^2+〖Py〗^2 ) 典型双轴引脚(有串扰)
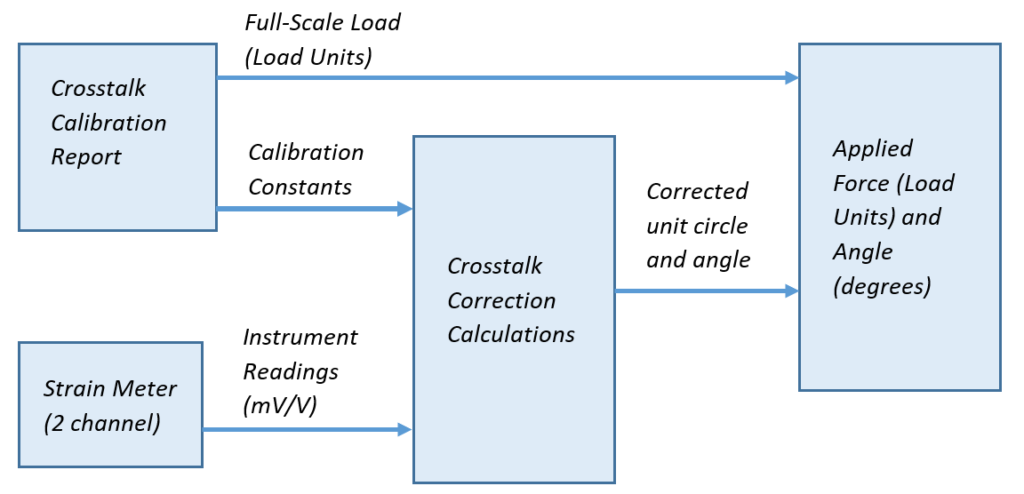
为了减少串扰的影响,数学校正是更好、更完整的方法。使用一组固定方程、校准常数和应变计读数来计算校正。
串扰校准是在理想条件下在制造工厂进行的。校准生成工厂校准常数。系统安装后,还建议进行就地系统校准。这将生成一组新的校准常数。然后将使用新的就地校准常数代替工厂校准常数,因为它们已根据安装的实际条件进行了改进。幸运的是,就地校准不受工厂校准期间使用的相同角度和力测量要求的限制。
应用时,数学校正以校正单位圆的形式提供最佳可能的测量(对于零刻度和满刻度之间的负载,范围分别在 0 和 1 之间)。此外,校正提供了更准确的施力角度。
校正后的应变计测量结果与传感器成几何比例。要计算以载荷单位表示的合力分量,只需将修正后的单位圆的大小乘以满量程载荷即可。如果需要,可以使用简单的几何方程在圆柱坐标和笛卡尔坐标之间进行转换。
使用此方法更新的就地校准将提高旧/现有装置读数的准确性。此外,还可以定期就地重新校准。
由于技术成本低且易于使用,因此建议采用自动化串扰校正。如需了解更多信息、现场校准支持或串扰校正自动化方面的帮助,请联系 Strainsert。
